Competition History
- 2024
- MIT IEEE Micromouse Competition (2nd place)
- Rero Micromouse Competition
- Japan Micromouse Competition Kansai Regional Tournament
- Japan Micromouse Competition Tokyo Regional Tournament
Regulation summary
- The micromouse must fit within an 18 cm × 18 cm footprint.
- Each successful run that reaches the goal receives a recorded run time.
- The fastest run time among all attempts is counted as the official result.
- Competitors have a total of 10 minutes, including any parameter adjustments.
- There is no limit to the number of runs within the allotted time.
- Regulation found here 2024 IEEE MIT Micromouse Guideline.pdf
Micromouse “Ingalls”
* Click here to jump to section about my first micromouse.
I am fully building and programming my second micromouse, “Ingalls”. The PCB is designed in KiCad, and the control software is written in C++ using the ESP-IDF. Stepping motor is used for ease of control and precise motion.
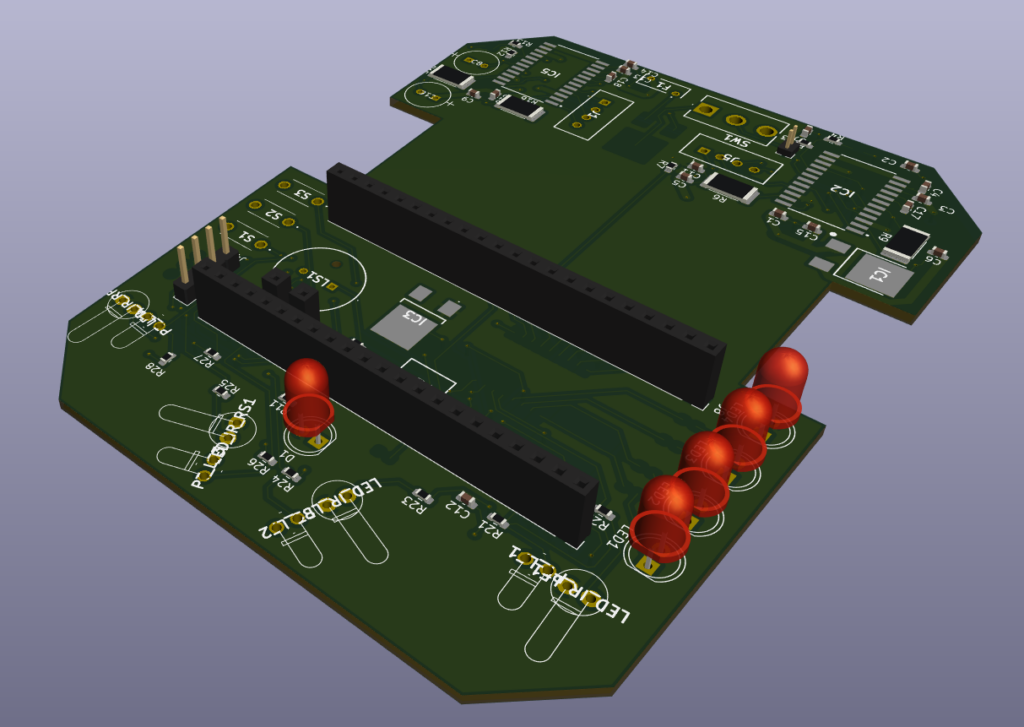
Picture: PCB board (still developing)
Specification:
- Motor: Stepping Motor
- Microcontroller: ESP32
- Wall detection: IR LED + Photo-transistor
- Battery: Li-po battery (12V)
- Algorithm: Flood fill
- Size: Classic size (18cm x 18cm)
Current State: Finalizing PCB design
General Information & Code: My Github page.
Schematic Diagram
Micromouse “Pilgrim”
I programmed on purchased micromouse hardware (Pi:Co V2 Micromouse by RT.corp) using Arduino IDE. I used a basic flood-filling algorithm, with both maze-searching mode and fast-run mode.
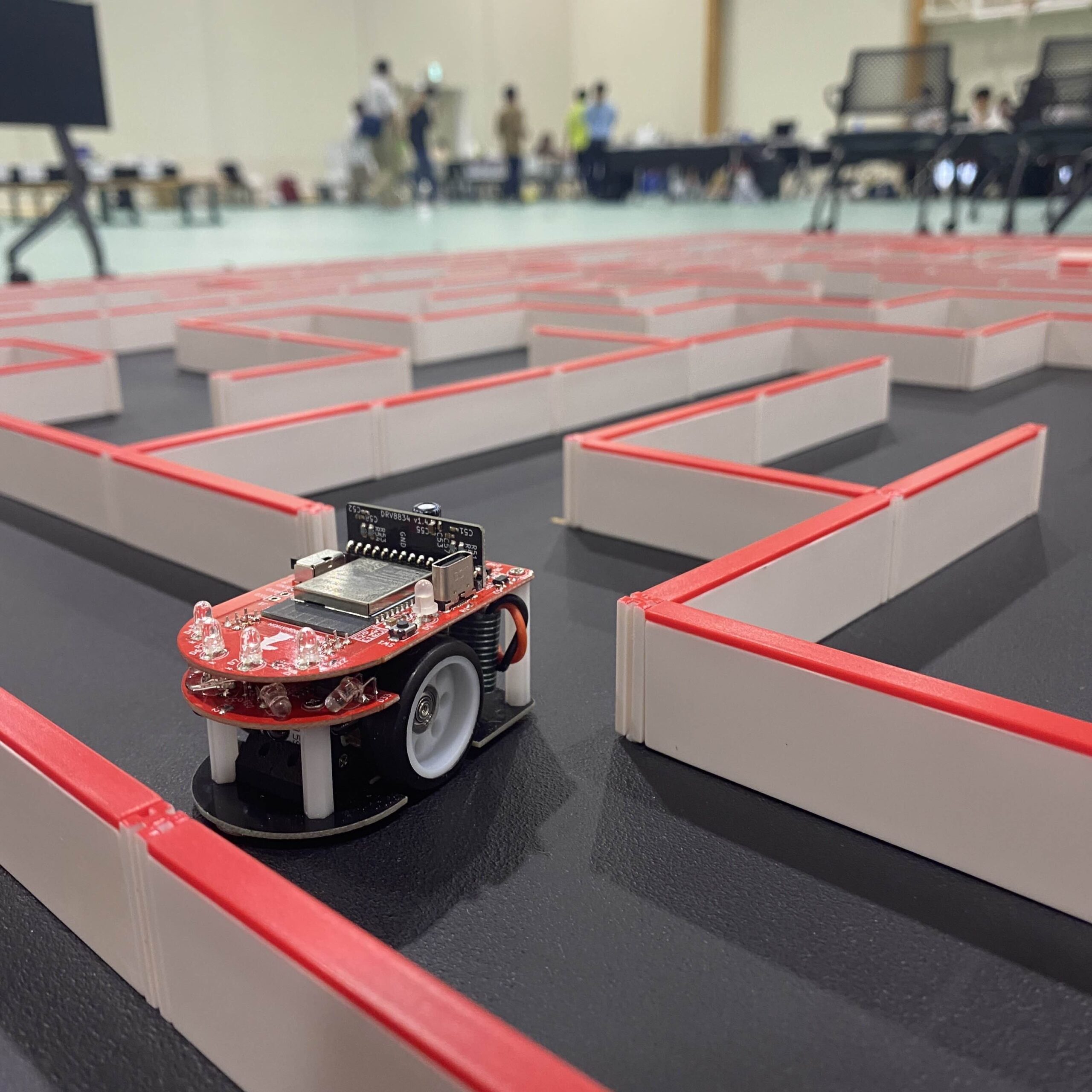
Picture: “Pilgrim” at competition
Specification:
- Motor: Stepping Motor
- Microcontroller: ESP32
- Wall detection: IR LED + Photo-transistor
- Algorithm: Flood fill
- Size: half-size (9cm x 9cm)
Full run video can be found here.